


完全自主
提供先进的导航功能,无需额外的基础设施,就能在通信范围之外和 BVLOS 部署,无论是否使用 GPS

世界领先的SLAM
在其他SLAM 系统失效的挑战性环境中,其可靠性已得到验证

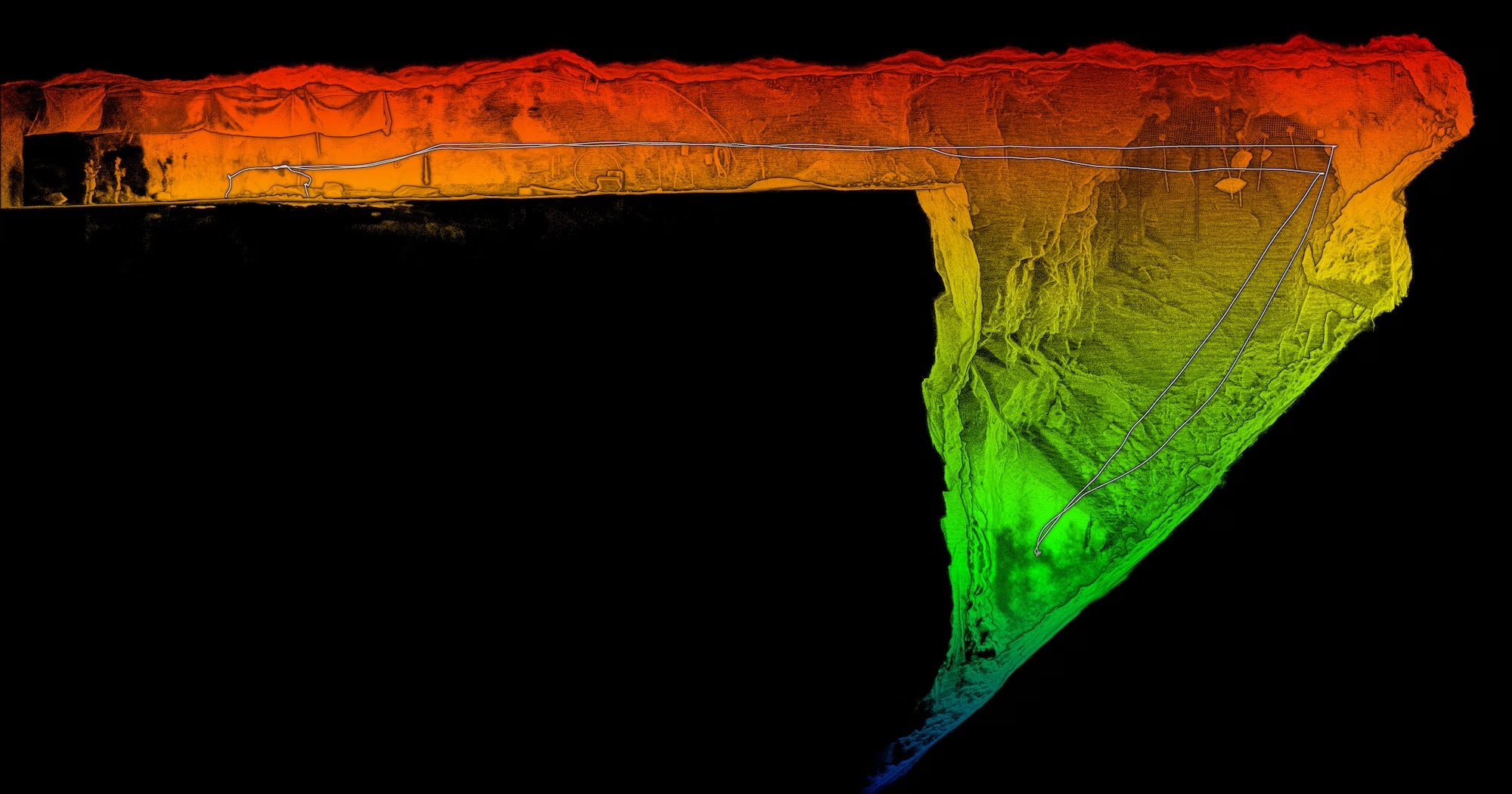
实时可视化
在扫描时预览点云,确保完整采集数据
自动地理参照
提高准确性,消除劳动密集型耗时流程

先进的防碰撞系统
提供虚拟安全气泡,使无人机能够在 GPS 信号被屏蔽的复杂环境中安全飞行
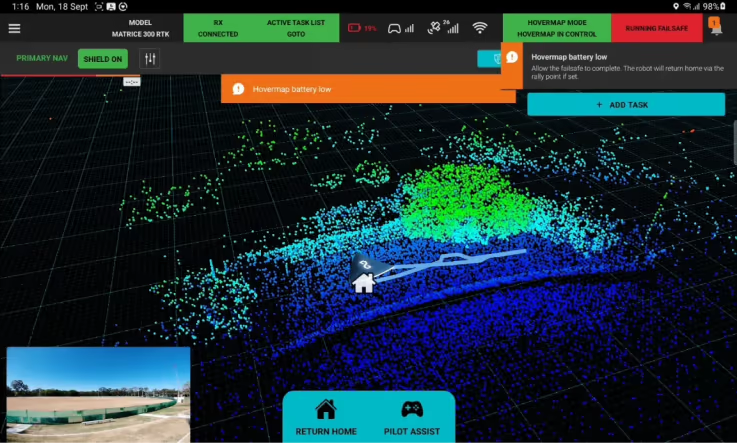
内置故障保险
分级警告和通知系统可让您随时了解扫描过程中需要采取的任何必要行动,以确保任务按计划进行

返回首页
若通讯中断,无人机将返回起飞点。

灰尘过滤
即使在尘土飞扬的环境中,也能更安全、更自信地飞行

多功能部署
单个设备可在多个部署平台之间轻松切换


