








1. ضع أهدافك
لا مزيد من الصلبان المرسومة الباهتة أو الكرات الرغوية سهلة التلف! أهداف التحكم الأرضية من Emesentمتينة ويسهل وضعها وتركها في مكانها للمسح المتكرر. تتوافر أقراص Emesentالمثبتة على حنفية أو يمكن بسهولة الحصول على أهداف الأقراص العاكسة أو صنعها.
2. مسح الأهداف
استخدام محطة إجمالية أو عربة نظام تحديد المواقع العالمي (GPS) للمسح في مواقع الأهداف الجديدة. ويضمن وضع أهداف Emesentالمثبتة على الحنفية في أطواق المسح الحالية تزامن مراكز الأهداف مع مواقع منشور المسح الحالية، مما يجنب الحاجة إلى إعادة المسح.
.avif)
3. إجراء مسح دون توقف
يُستخدم التعلّم الآلي لاكتشاف الأهداف تلقائيًا في المسح أثناء المعالجة، لذلك لا حاجة لإيقاف أو وضع Hovermap على الهدف، مما يقلل من وقت المسح.

4. معالجة البيانات
حدد لإدخال بيانات المسح الأولية وإحداثيات المسح في برنامج Aura الخاص بشركة Emesent. يكتشف برنامج التحكم الأرضي تلقائيًا أهداف المسح ويطبق تحويلًا غير جامد لسحابة النقاط، مما يمنحك أكثر النتائج دقة.
.avif)
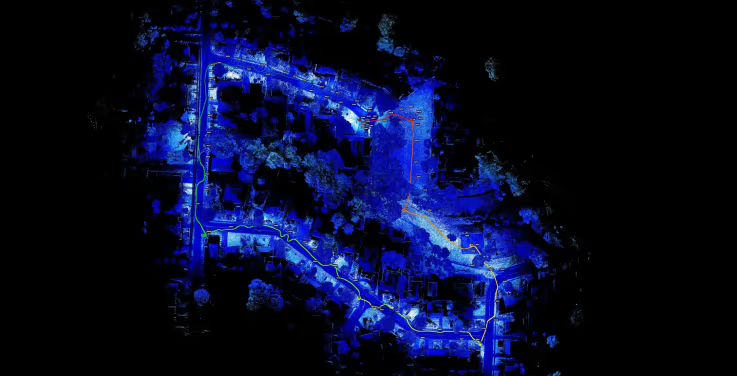
5. تأكيد النتائج
يمكن تشغيل المعالجة تلقائيًا من البداية إلى النهاية دون تفاعل، أو يمكن عرض نتائج اكتشاف الهدف ومطابقة الكوكبة في Emesentسحابة النقاط في Aura لتأكيدها أو تعديلها.
.avif)
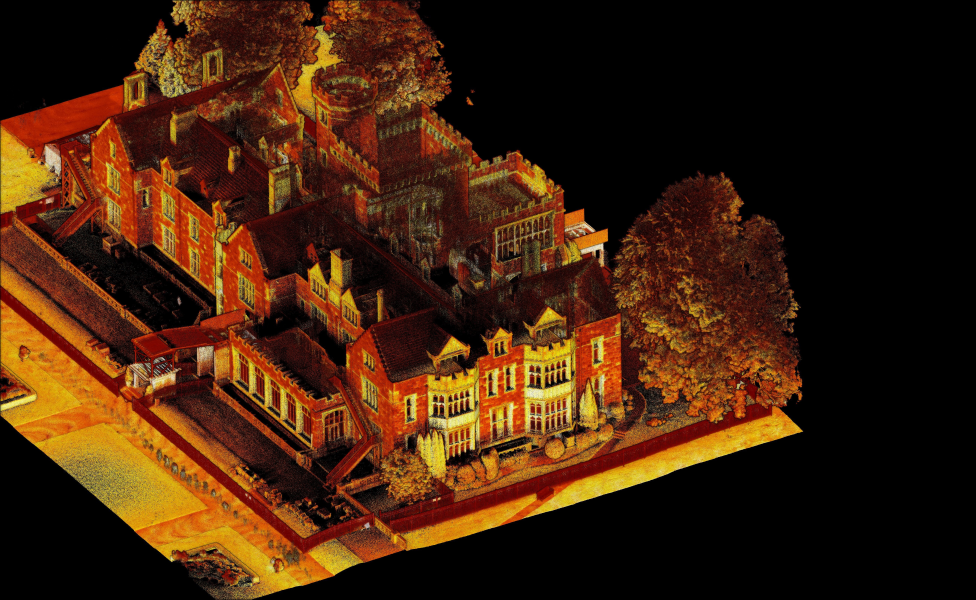
6. نتائج تقدير نتائج استبيان المخرجات
سحابة نقاط Hovermap دقيقة ذات مرجعية جغرافية دقيقة جاهزة للاستخدام.


