تُعد سرعة القياس الفائقة ميزة كبيرة للماسحات الضوئية المتزامنة لتحديد المواقع ورسم الخرائطSLAM، خاصةً في الأماكن المغلقة. ولكن كيف يكون أداء SLAM الضوئية الثابتة الأرضية في هذه البيئة؟ قام فريق من قسم الجيوديسيا الخاصة في الجامعة التقنية التشيكية في براغ باختبارها في نفق تعدين بطول 120 متراً.
في هذه الدراسة، طور الباحثون طريقة لتقييم دقة نوعين من الماسحات الضوئية، الثابتة و SLAM في الظروف القاسية لأنفاق المناجم. قاموا باختبار ماسحتين ضوئيتين ثابتتين - Trimble X7 و Faro Focus - مقابل أربع SLAM من NavVis و GeoSLAM و Faro و Emesent لمقارنة أدائها. تم قياس جميع الماسحات SLAM على نتائج المسح في اتجاهين، أي من بداية النفق إلى نهايته والعودة مرة أخرى، باستثناء Emesent . والمثير للدهشة أن بعض SLAM الأحدث كان أداؤها مماثلاً أو أفضل من الماسحات الضوئية الثابتة، لا سيما من حيث الدقة الإجمالية، على الرغم من أن السحب النقطية الناتجة كانت تميل إلى أن تكون أكثر ضوضاءً. على الرغم من ذلك، يمكن تقليل الضوضاء بشكل فعال من خلال التنعيم، على الرغم من أن بعض تفاصيل السطح قد تضيع في هذه العملية. تتمتع SLAM أيضًا بميزة جمع سحب نقطية أكثر اكتمالاً لأنها لا تعاني من الظلال بقدر الماسحات الضوئية الثابتة، التي تتطلب عددًا كبيرًا من عمليات المسح لتقليل الفجوات في السحابة النقطية.
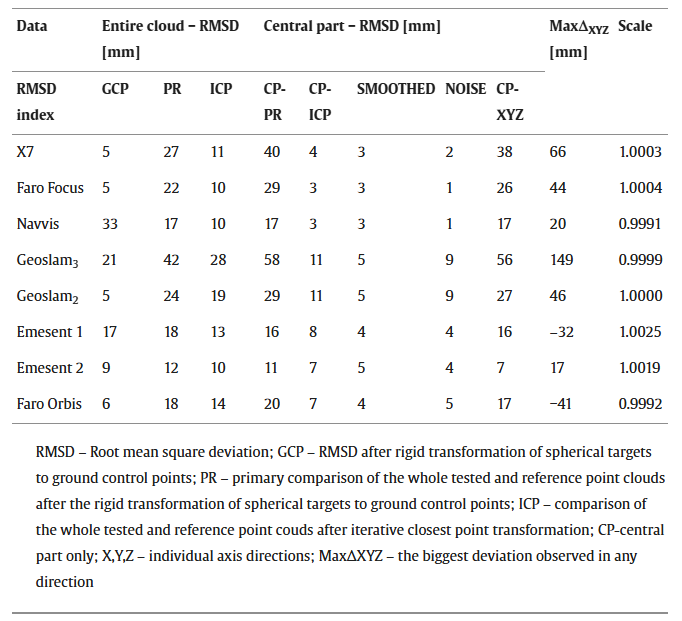
فيما يتعلق بخاصية الدقة التي تصف التطبيق العملي بشكل أفضل، أي الدقة الإجمالية لسحابة النقاط، كانت النتيجة الأبرز هي SLAM الأحدث من Emesent وهو Hovermap الذي حقق دقة أفضل من الماسحات الضوئية الثابتة التي خضعت للاختبار. ورغم أن هذه النتائج تنطبق بشكل أساسي على البيئات الوعرة مثل أنفاق المناجم، إلا أنه يمكن تكييف مسار العمل الذي اتبعته الدراسة لتقييم أداء الماسحات الضوئية في بيئات أخرى أيضًا.
ويرد أدناه ملخص للنتائج. RMSD CP-XYZ - الانحراف المربع الجذري المتوسط للأخطاء المنتظمة في جميع الاتجاهات من جميع القياسات باستخدام الماسح الضوئي الفردي، و MAXΔXYZ، أي أعلى خطأ منتظم وحيد في أي اتجاه تم العثور عليه خلال التكرارات الثلاثة لكل ماسح ضوئي فردي، ربما تكون أهم المعلمات للتطبيق العملي لأنها تشير إلى الحد الأقصى لعدم الدقة المنتظمة للماسح الضوئي.