卓越的测量速度是同步定位和绘图 (SLAM) 扫描仪的一大优势,尤其是在封闭空间内。但在这种环境下,SLAM 与地面静态扫描仪相比如何?布拉格捷克技术大学特殊大地测量学系的一个小组在一条 120 米长的采矿隧道中对其进行了测试。
在这项研究中,研究人员开发了一种方法,用于评估两种类型扫描仪——静态SLAM——在矿井隧道复杂环境中的精度。他们测试了两款静态扫描仪(Trimble X7和Faro Focus),并与来自NavVis、GeoSLAM、Emesent SLAM 性能对比。Emesent ,SLAM扫描仪均通过双向扫描结果进行测评(即从隧道起点扫描至终点再返回)。令人惊讶的是,部分SLAM 的整体精度表现与静态扫描仪相当甚至更优,尽管其生成的点云数据存在更多噪声。 尽管如此,通过平滑处理可有效降低噪声,但该过程可能导致部分表面细节丢失。SLAM 还具有采集更完整点云的优势——它们不像静态扫描仪那样受遮挡影响,后者需要大量扫描才能最大限度减少点云中的空隙。
在最能反映实际应用场景的精度指标(即点云的整体精度)方面Emesent最新SLAM Hovermap 表现尤为突出,其精度优于此次测试中的静态扫描仪。虽然这些研究结果主要适用于矿井隧道等恶劣环境,但该研究的工作流程也可加以调整,用于评估扫描仪在其他环境中的性能。
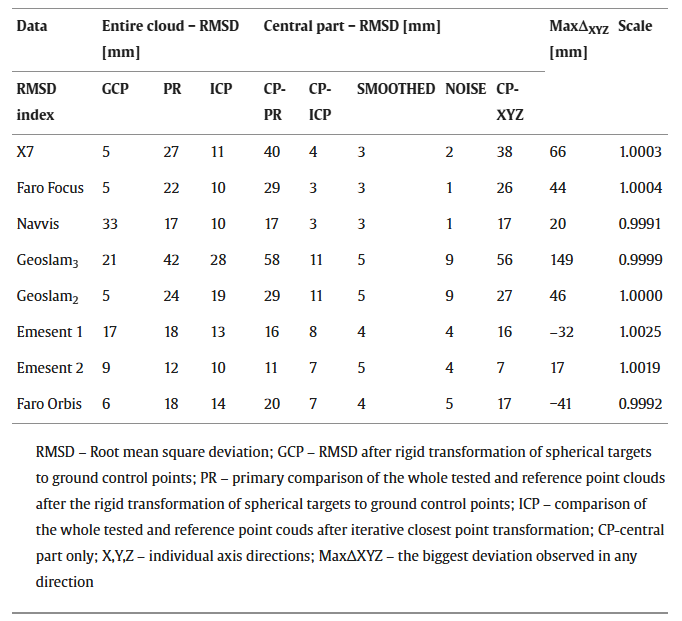
研究结果摘要如下。RMSD CP-XYZ - 使用单个扫描仪进行的所有测量中所有方向的系统误差的均方根偏差 (RMSD),以及 MAXΔXYZ,即每个单个扫描仪在三次重复测量中发现的任何方向上的单个最大系统误差,可能是实际应用中最重要的参数,因为它们显示了扫描仪的最大系统误差。