
Emesent Hovermap la technologieSLAM(Simultaneous Localization and Mapping) pour déterminer sa position et générer des nuages de points précis. Fruit de plusieurs années de recherche sur l'autonomie des drones, SLAM Emesentoffre une grande fiabilité dans les environnements souterrains difficiles et autres lieux où le GPS est indisponible. Cependant, SLAM du balayage laser sur trépied en ce que les résultats obtenus dépendent davantage de l'identification des repères présents dans l'environnement.
Les tunnels et les ponceaux comptent parmi les environnements les plus difficiles pour SLAM . L'absence de repères dans ces environnements peut entraîner SLAM , ce qui se traduit par un nuage de points incohérent pouvant s'avérer inutilisable pour l'usage auquel il est destiné.
Dans cet article, nous vous expliquerons comment numériser un ponceau complexe et vous donnerons quelques conseils pour obtenir le meilleur résultat à chaque fois. Si vous souhaitez consulter le nuage de points utilisé dans ce guide, vous pouveztélécharger l'ensemble de données ici.
Par Ryan Palfrey et Andrew Palmer
EN QUOI LE PASSAGE SOUTERRAIN PRÉSENTE-T-IL UN DÉFI ?
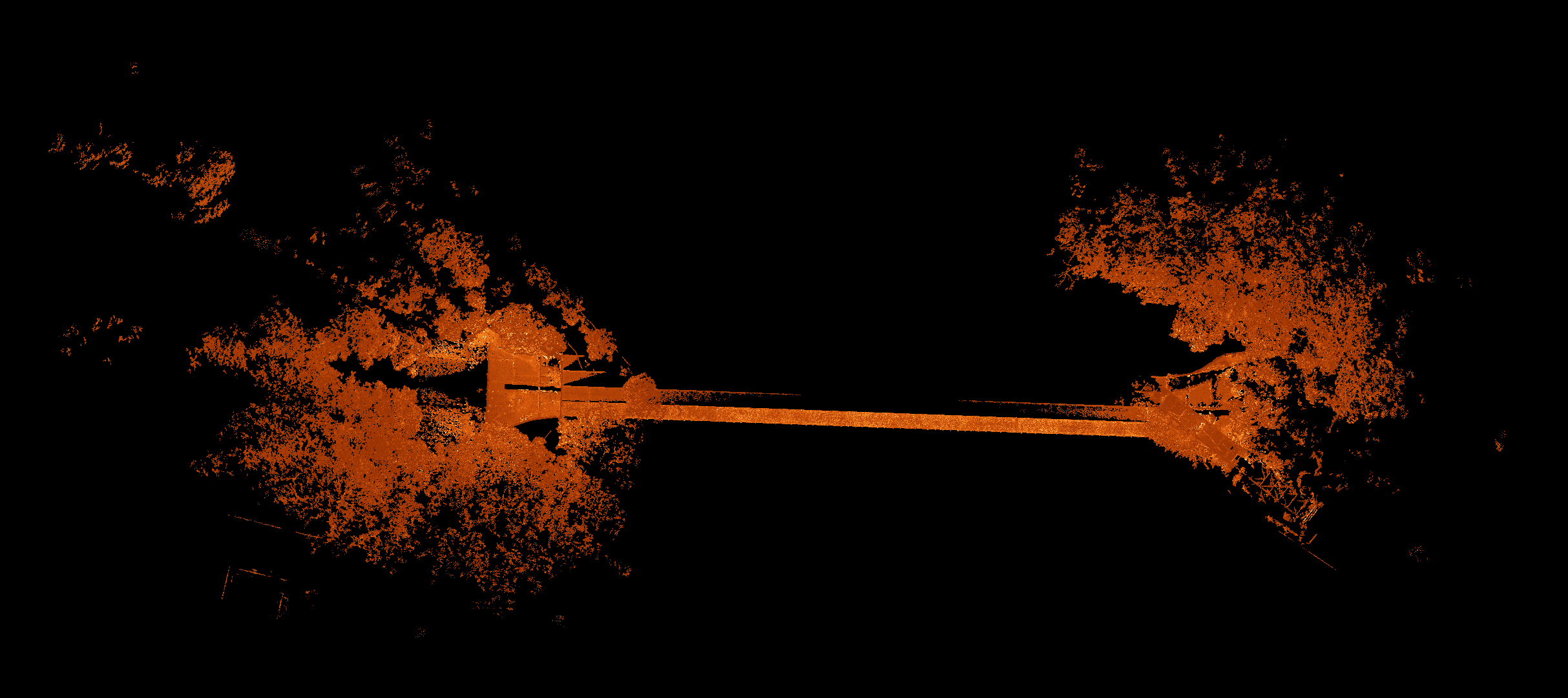
Le ponceau que nous inspectons mesure 130 mètres de long et est assez étroit, avec une largeur de 3 mètres et une hauteur de 3,5 mètres.
Le sol, le plafond et les murs sont lisses, et l'environnement à chaque extrémité du ponceau est principalement constitué d'arbres et d'un ruisseau.


SLAM les surfaces présentes dans l'environnement pour déterminer Hovermap . Les murs, le sol et le plafond du canalisation constituent d'excellents repères qui permettent à Hovermap savoir précisément où il se trouve au sein de la section transversale de la canalisation, mais ne fournissent aucune information quant à sa Hovermap sur la longueur de celle-ci.
En l'absence d'autres repères dans l'environnement, SLAM fort de dériver dans cette direction.
CONSEILS POUR LA COLLECTE DE DONNÉES DANS DES ENVIRONNEMENTS À FAIBLE RÉSOLUTION
Le mieux est de tenir Hovermap ce qu'il puisse voir les deux extrémités du ponceau ; par exemple, tenez Hovermap le côté.
Comme le ponceau ne présente aucun repère permettant de déterminer sa position sur toute sa longueur, SLAM s'appuie SLAM sur les repères situés à chacune de ses extrémités. Il est donc essentiel de veiller à ce que ces deux extrémités soient visibles autant que possible afin de réduire au minimum le risque de SLAM .
De plus, essayez de vous positionner de manière à ce que le Hovermap au centre du ponceau, et évitez les mouvements rapides ou saccadés.

Compte tenu du nombre limité d'éléments dans le ponceau, il convient d'éviter d'introduire des éléments perturbateurs. Les éléments perturbateurs sont des éléments de l'environnement susceptibles de perturber SLAM, tels que les personnes et les véhicules en mouvement, l'eau et le brouillard. Si vous devez être accompagné par quelqu'un pour des raisons de sécurité, demandez-lui de marcher du côté opposé à vous par rapport à Hovermap qu'il se trouve dans l'angle mort et ne génère pas d'éléments perturbateurs.
Si tout le reste échoue, vous pouvez ajouter vos propres repères aux environnements. Par exemple, placez de grands cartons tous les 50 mètres environ. Vous devez vous assurer qu'ils ne bougent pas pendant la numérisation afin qu'ils ne deviennent pas des repères négatifs.
TRAITEMENT DE LA NUMÉRISATION
Nous avons réalisé des scans du ponceau dans deux configurations :
- En tenant l'Hovermap le côté, sans que personne ne le suive
- Hovermap au sac à dos, avec une personne qui le suit
Le premier scan a été traité sans glissement en utilisant les paramètres par défaut d'Aura.
Les graffitis présents dans le tunnel peuvent servir à démontrer qu'il n'y a pas eu de glissement brusque.

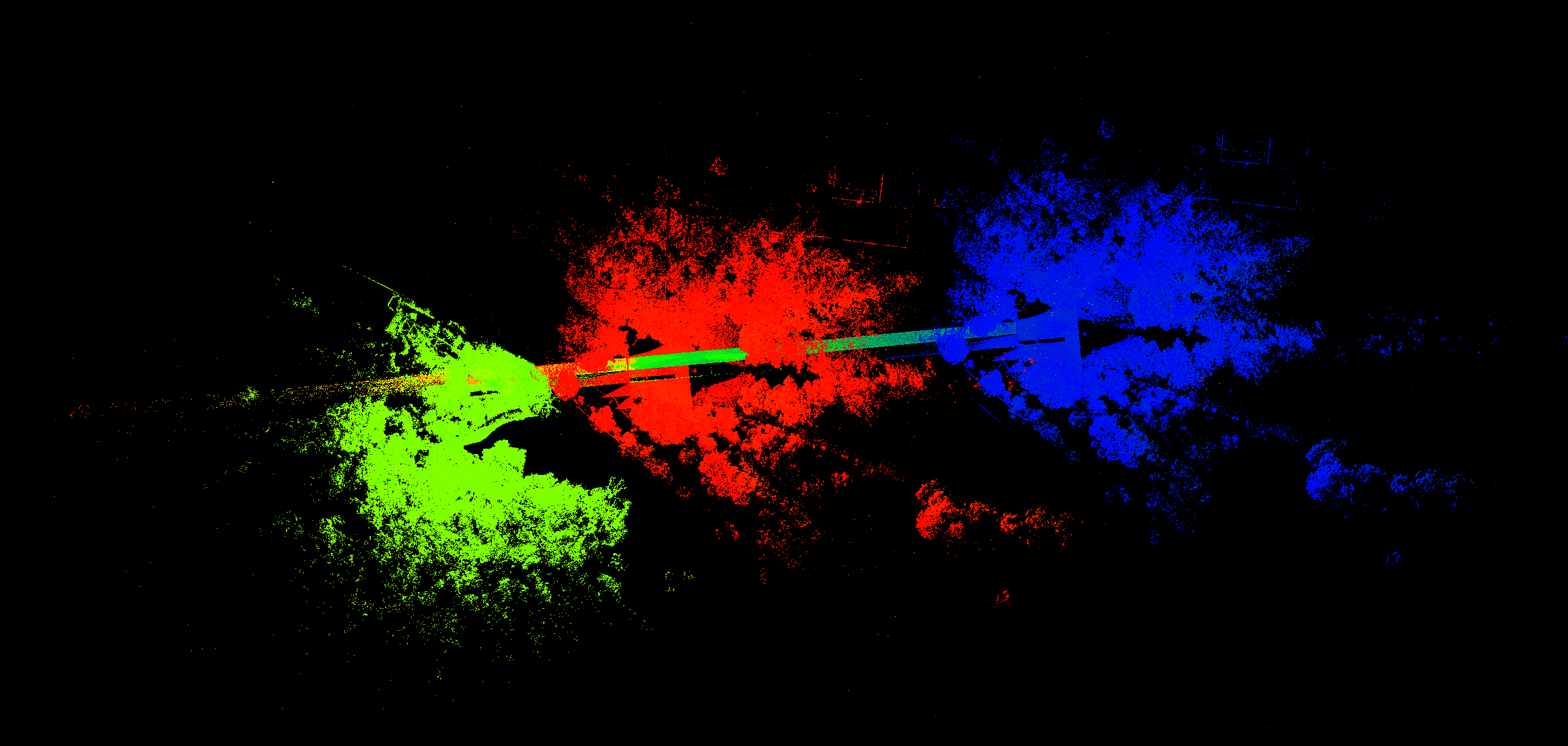
Le deuxième balayage n'a pas pu être traité sans glissement avec les paramètres par défaut, en raison du champ de vision restreint dû au montage sur le sac à dos, ainsi que de l'ajout d'éléments négatifs provenant de la personne qui suivait. La coloration du scan en fonction du temps permet de mettre en évidence les moments où SLAM s'est produit. Sur l'image tricolore, le scan a commencé du côté droit du ponceau, a traversé celui-ci, puis est revenu. Lors du trajet de retour, SLAM glissé de manière assez spectaculaire et, par conséquent, la fin du scan ne correspond pas au début de celui-ci.
Cette image montre le scan coloré en fonction du temps (bleu -> vert -> rouge). Les parties bleues et rouges du scan correspondent respectivement au début et à la fin, et doivent être alignées.
PARAMÈTRES DE TRAITEMENT AURA
Il existe certains paramètres que l'on peut modifier dans Aura permettent de réduire le glissement par choc.
SousAvancé -> Mappage local -> Fenêtre, modifiez lavaleurpar défaut dela « Durée de glissement » (en secondes) de 5 à 10, et celledu « Décalage de glissement » (en secondes) de 1 à 0,5. Veuillez noter que la modification de ces valeurs multiplie par 4 ou 5 le temps de traitement de certaines parties du SLAM .
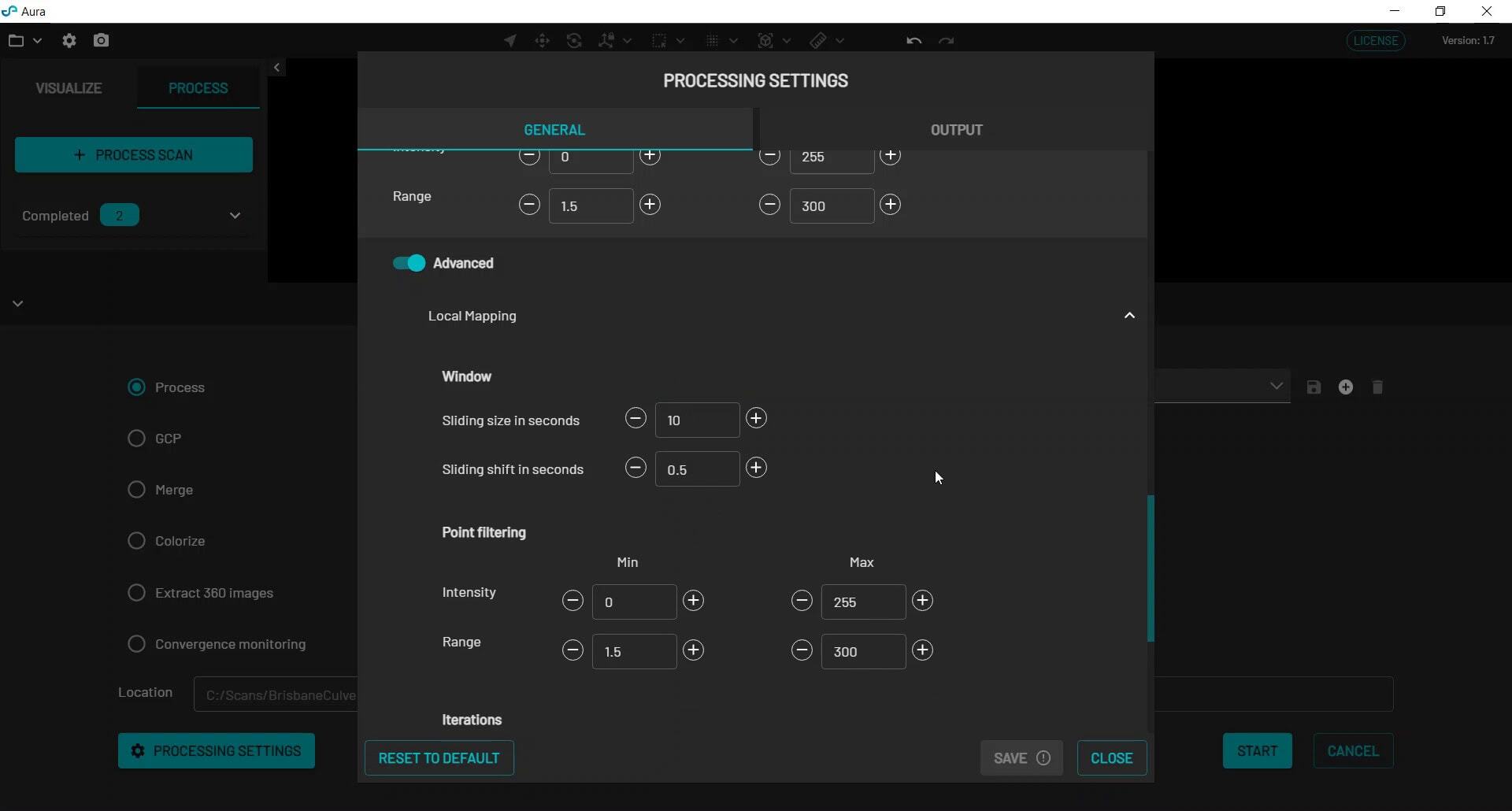
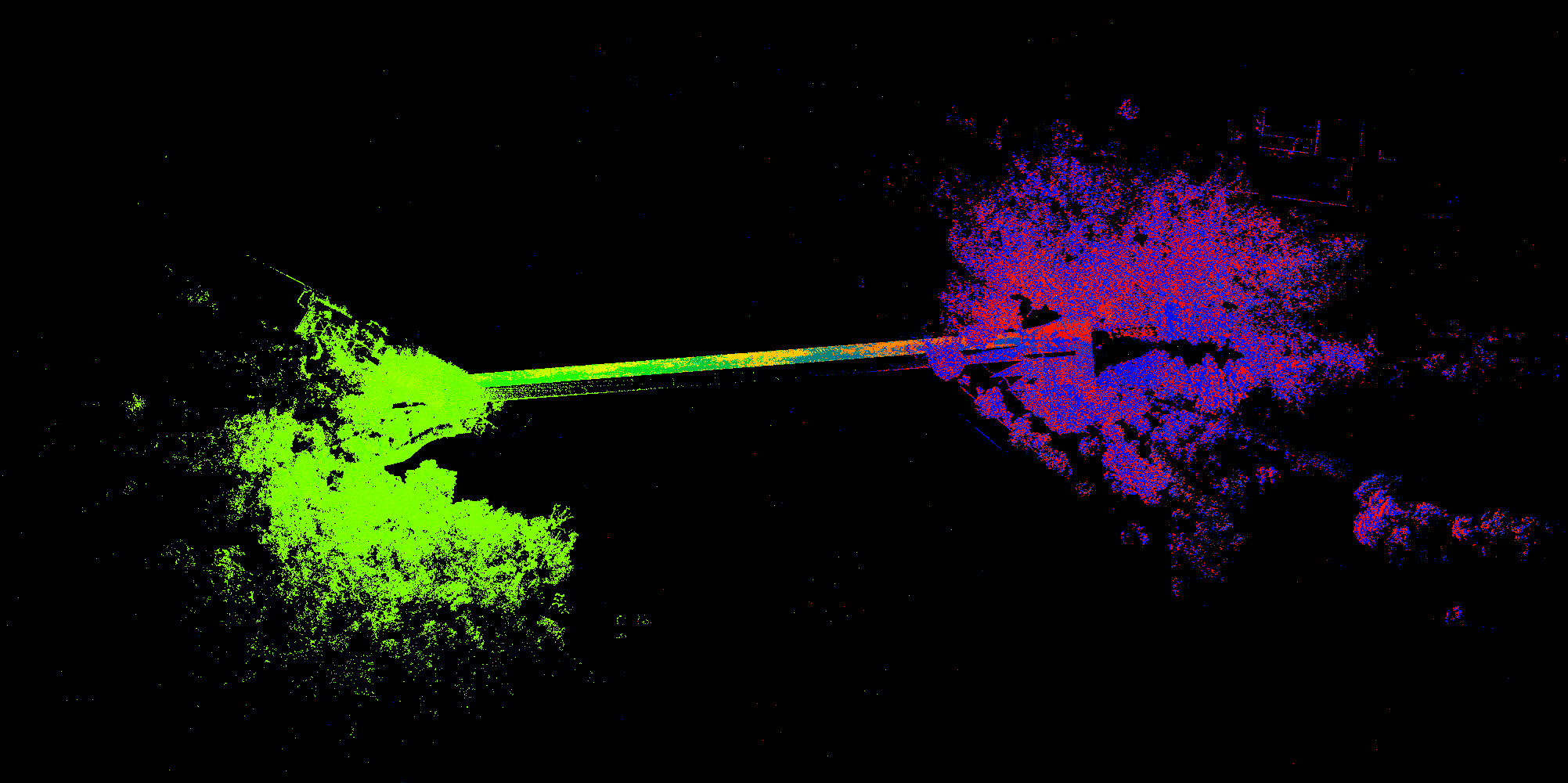
Grâce à ces Aura modifiés Aura , la numérisation s'effectue désormais sans aucun décalage, et le début et la fin de la numérisation s'alignent parfaitement.
Si, à tout moment, vous avez besoin de conseils concernant un examen complexe, n'hésitez pas à nous contacter : nous sommes toujours ravis de vous aider.
En attendant, si vous souhaitez consulter le nuage de points que nous avons utilisé dans ce guide, vous pouvez télécharger l'ensemble de données ici.