
Emesent Hovermap SLAM Localization andSLAM), um seine Position zu ermitteln und präzise Punktwolken zu erstellen. Nach jahrelanger Forschung im Bereich der Drohnenautonomie ist SLAM Emesentauch unter schwierigen Bedingungen im Untergrund und in anderen Umgebungen ohne GPS-Empfang äußerst zuverlässig. SLAM jedoch vom Laserscanning mit Stativ dadurch, dass die erfassten Ergebnisse stärker von der Erkennung von Merkmalen in der Umgebung abhängen.
Tunnel und Durchlässe gehören zu den anspruchsvollsten Umgebungen für SLAM . Der Mangel an Orientierungspunkten in diesen Umgebungen kann zu SLAM führen, was eine inkonsistente Punktwolke zur Folge hat, die für den vorgesehenen Zweck möglicherweise unbrauchbar ist.
In diesem Beitrag zeigen wir Ihnen, wie Sie einen schwierigen Durchlass scannen, und geben Ihnen einige Tipps, damit Sie jedes Mal das bestmögliche Ergebnis erzielen. Wenn Sie sich die Punktwolke ansehen möchten, die wir in dieser Anleitung verwendet haben, können Sieden Datensatz hier herunterladen.
Von Ryan Palfrey & Andrew Palmer
WAS MACHT DEN DURCHLASS ZU EINER HERAUSFORDERUNG?
Der Durchlass, den wir scannen, ist 130 m lang und mit einer Breite von 3 m und einer Höhe von 3,5 m recht schmal.
Der Boden, die Decke und die Wände sind glatt, und die Umgebung an beiden Enden des Durchlasses besteht hauptsächlich aus Bäumen und einem Bach.


SLAM Oberflächen in der Umgebung, um Hovermap des Hovermap bestimmen. Die Wände, der Boden und die Decke des Durchlasses sind hervorragende Orientierungspunkte, anhand derer der Hovermap genau Hovermap , wo er sich innerhalb des Querschnitts des Durchlasses Hovermap ; sie liefern jedoch keine Informationen darüber, an welcher Stelle entlang der Länge des Durchlasses Hovermap der Hovermap .
Da in der Umgebung keine anderen Orientierungspunkte vorhanden sind, SLAM höchstwahrscheinlich in diese Richtung abdriften.
TIPPS ZUR DATENERFASSUNG IN UMGEBUNGEN MIT BEGRENZTEN RESSOURCEN
Am besten halten Sie den Hovermap , dass er beide Enden des Durchlasses erfassen kann; halten Sie den Hovermap beispielsweise seitlich Hovermap .
Da es im Durchlass keine Merkmale gibt, anhand derer sich seine Position entlang der Durchlasslänge bestimmen lässt, stützt sich SLAM auf Merkmale an beiden Enden des Durchlasses. Um das Risiko eines SLAM zu minimieren, ist es entscheidend, dass beide Enden so gut wie möglich sichtbar sind.
Versuchen Sie außerdem, sich so zu positionieren, dass Hovermap der Hovermap in der Mitte des Durchlasses Hovermap , und vermeiden Sie schnelle oder ruckartige Bewegungen.

Da es in dem Durchlass nur wenige Merkmale gibt, sollten Sie vermeiden, störende Elemente einzubringen. Störende Elemente sind Objekte in der Umgebung, die SLAM verwirren können, wie beispielsweise sich bewegende Personen und Fahrzeuge, Wasser und Nebel. Wenn Sie aus Sicherheitsgründen von jemandem begleitet werden müssen, bitten Sie diese Person, auf der dem Hovermap gegenüberliegenden Seite zu gehen Hovermap sie sich im toten Winkel befindet und keine störenden Elemente verursacht.
Wenn alles andere fehlschlägt, können Sie den Umgebungen eigene Objekte hinzufügen. Stellen Sie beispielsweise etwa alle 50 Meter große Kartons auf. Sie müssen darauf achten, dass diese sich während des Scans nicht bewegen, damit sie nicht als Störfaktoren wirken.
VERARBEITUNG DES SCANS
Wir haben Scans des Durchlasses in zwei Konfigurationen erfasst:
- Die Hovermap seitlich ausstrecken, ohne dass jemand folgt
- Hovermap am Rucksackzubehör, während jemand hinterherläuft
Der erste Scan, der ohne Verschiebung unter Verwendung der Standardeinstellungen in Aura verarbeitet wurde.
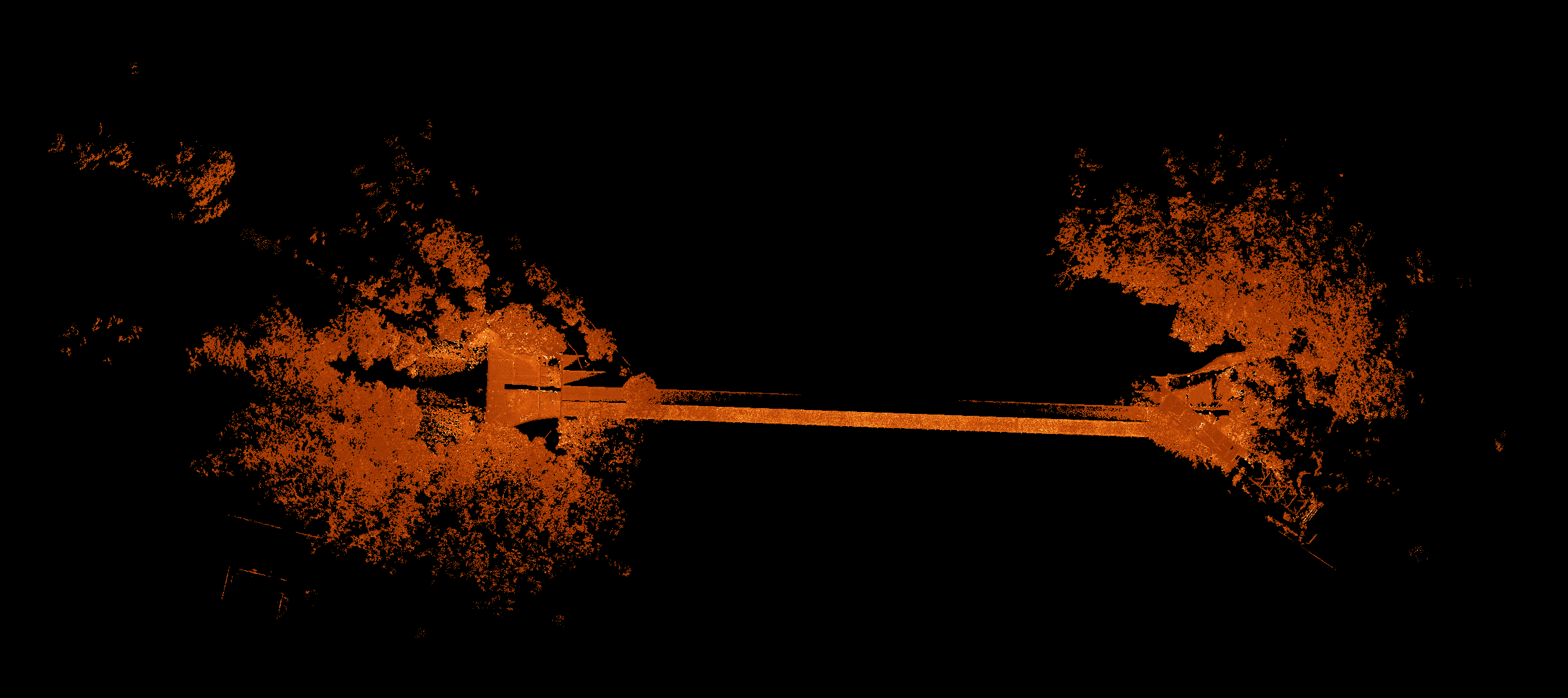
Graffiti im Tunnel können als Beweis dafür dienen, dass es keinen Slam-Slip gab.

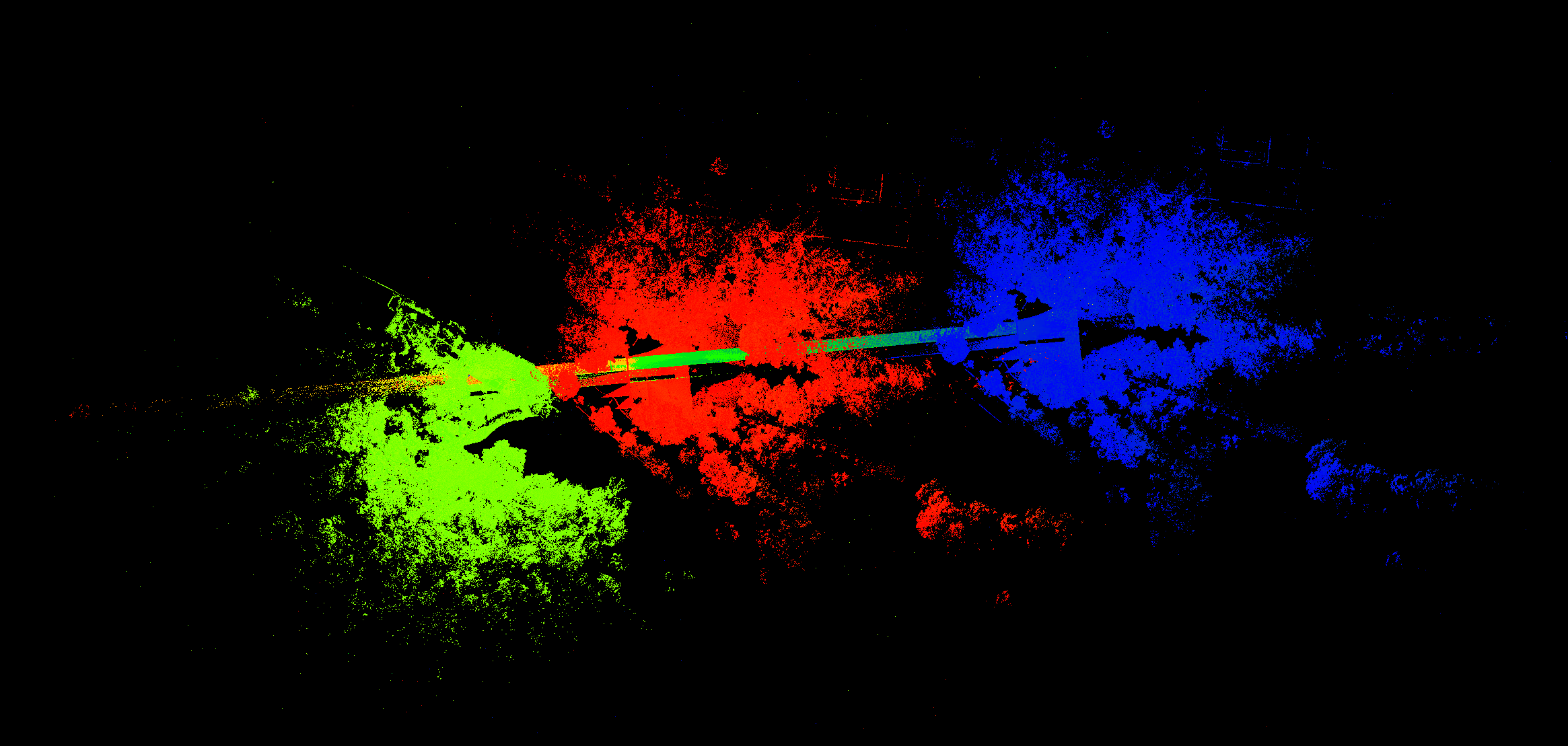
Der zweite Scan konnte mit den Standardeinstellungen nicht ohne Verschiebung verarbeitet werden, was auf das eingeschränkte Sichtfeld aufgrund der Befestigung am Rucksack sowie auf die negativen Einflüsse durch die nachfolgende Person zurückzuführen war. Die zeitliche Einfärbung des Scans verdeutlicht, wann SLAM aufgetreten ist. Auf dem dreifarbigen Bild begann der Scan auf der rechten Seite des Durchlasses, führte durch den Durchlass und wieder zurück. Auf dem Rückweg SLAM ziemlich stark verschoben, sodass das Ende des Scans nicht mit dem Anfang übereinstimmt.
Dieses Bild zeigt den Scan, der nach Zeit eingefärbt ist (blau -> grün -> rot). Der blaue und der rote Teil des Scans entsprechen dem Anfang bzw. dem Ende und sollten übereinstimmen.
AURA-VERARBEITUNGSEINSTELLUNGEN
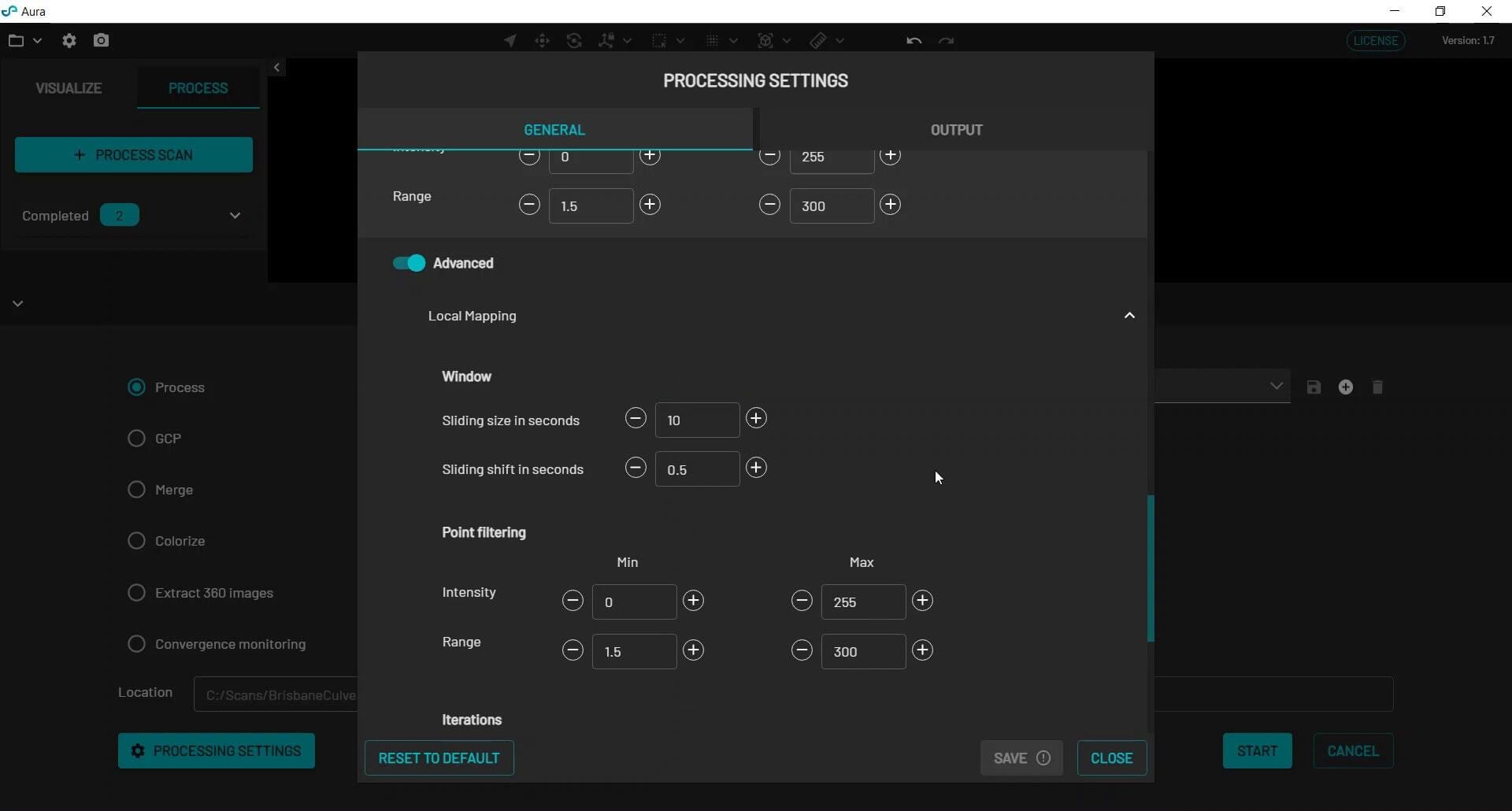
Es gibt einige Einstellungen in Aura , die wir ändern können Aura Slam-Slip-Phänomen zu verringern.
Ändern Sie unter„Erweitert“ -> „Lokale Zuordnung“ -> „Fenster“ die„Gleitzeit in Sekunden“vom Standardwert 5 auf 10 und die„Gleitverschiebung in Sekunden“vom Standardwert 1 auf 0,5. Beachten Sie, dass eine solche Änderung der Werte die Verarbeitungszeit bestimmter Teile der SLAM um das 4- bis 5-fache erhöht.
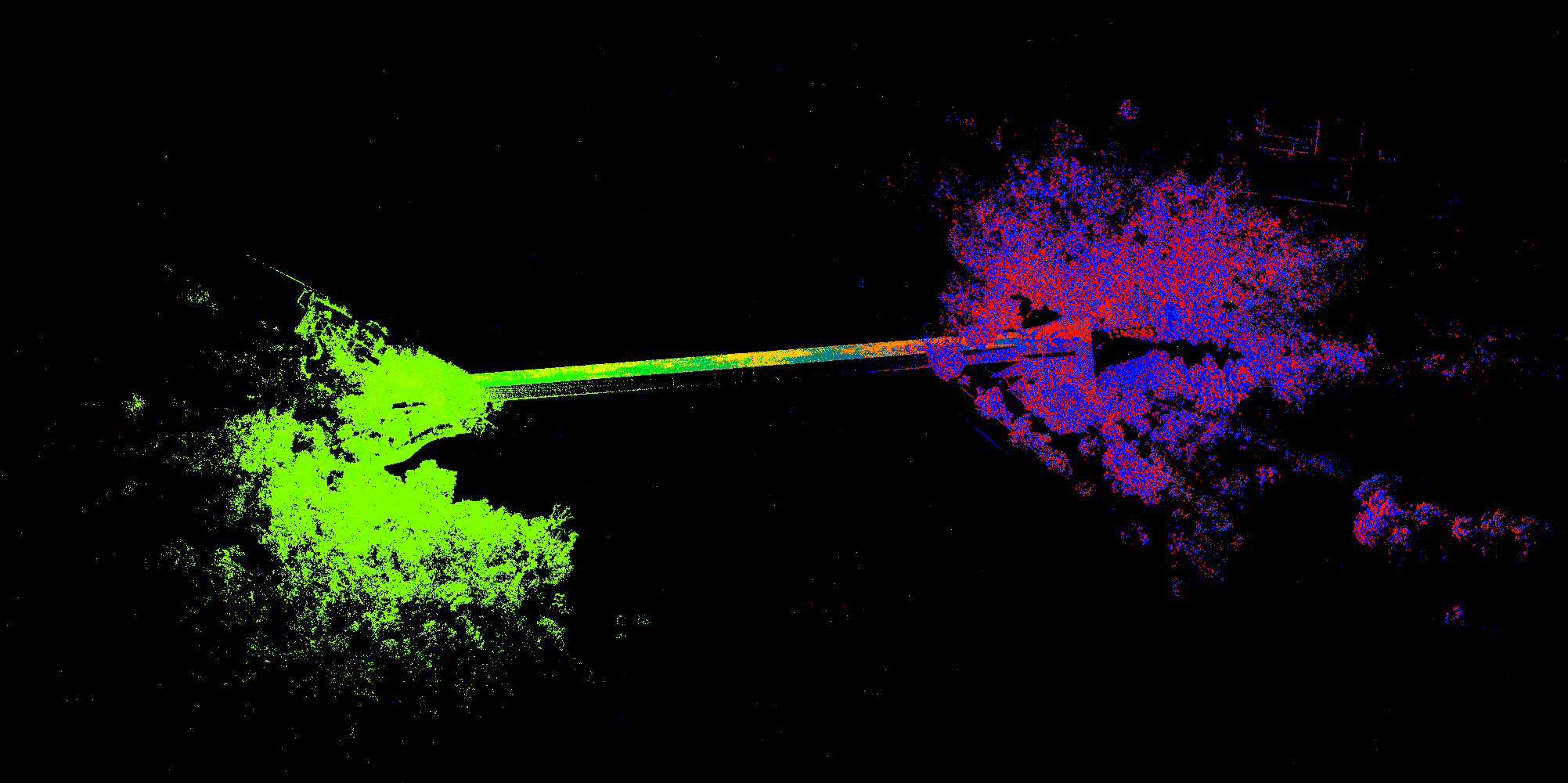
Mit diesen angepassten Aura läuft der Scan nun reibungslos ab, und Anfang und Ende des Scans stimmen perfekt überein.
Sollten Sie zu irgendeinem Zeitpunkt Beratung zu einem schwierigen Scan benötigen, zögern Sie nicht, sich bei uns zu melden – wir helfen Ihnen gerne weiter.
Wenn Sie sich in der Zwischenzeit die Punktwolke ansehen möchten, die wir in dieser Anleitung verwendet haben, können Sie den Datensatz hier herunterladen.