Die überragende Messgeschwindigkeit ist ein großer Vorteil vonSLAM Localization and Mapping), insbesondere in geschlossenen Räumen. Doch wie SLAM in dieser Umgebung SLAM zu stationären Boden-Scannern SLAM ? Ein Team der Abteilung für Spezialgeodäsie an der Tschechischen Technischen Universität in Prag hat dies in einem 120 Meter langen Bergbautunnel getestet.
In dieser Studie entwickelten die Forscher eine Methode zur Bewertung der Genauigkeit von zwei Arten von Scannern – statischen und SLAM – unter den rauen Bedingungen in Bergwerksstollen. Sie testeten zwei statische Scanner – den Trimble X7 und den Faro Focus – im Vergleich zu vier SLAM von NavVis, GeoSLAM, Faro und Emesent, um deren Leistung zu vergleichen. Alle SLAM Scanner wurden anhand von Zwei-Wege-Scans gemessen, d. h. vom Anfang bis zum Ende des Stollens und wieder zurück, mit Ausnahme des Emesent . Überraschenderweise schnitten einige der neueren SLAM vergleichbar gut oder sogar besser ab als die statischen Scanner, insbesondere hinsichtlich der Gesamtgenauigkeit, obwohl die resultierenden Punktwolken tendenziell mehr Rauschen aufwiesen. Trotzdem konnte das Rauschen durch Glättung effektiv reduziert werden, auch wenn dabei möglicherweise einige Oberflächendetails verloren gingen. Die SLAM hatten zudem den Vorteil, dass sie vollständigere Punktwolken erfassten, da sie nicht so stark unter Schattenbildung leiden wie statische Scanner, die eine große Anzahl von Scans erfordern, um Lücken in der Punktwolke zu minimieren.
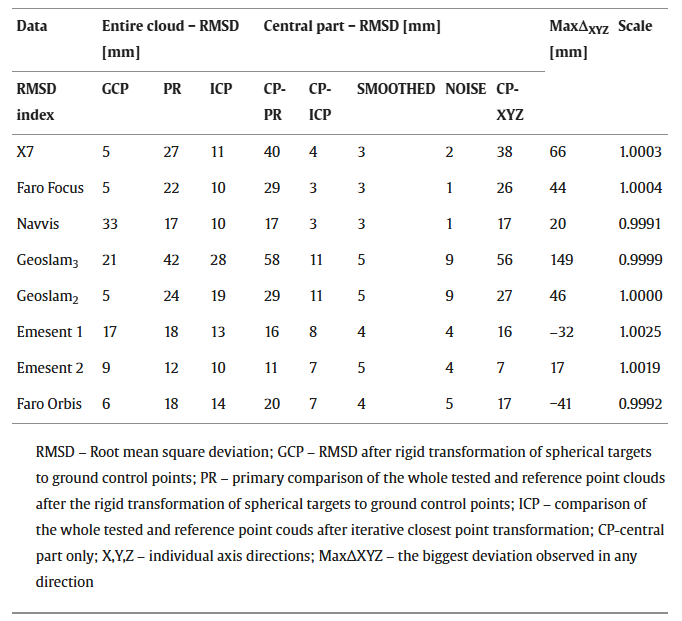
Bei der Genauigkeitskennzahl, die die reale Anwendung am besten beschreibt, d. h. der Gesamtgenauigkeit der Punktwolke, stach vor allem der neueste SLAM von Emesent, der Hovermap , hervor, der eine höhere Genauigkeit erzielte als die getesteten statischen Scanner. Auch wenn diese Ergebnisse vor allem für raue Umgebungen wie Stollen in Bergwerken gelten, lässt sich der Arbeitsablauf der Studie auch anpassen, um die Scannerleistung in anderen Umgebungen zu bewerten.
Nachstehend finden Sie eine Zusammenfassung der Ergebnisse. Der RMSD CP-XYZ – die quadratische Mittelwertabweichung (RMSD) der systematischen Fehler in allen Richtungen bei allen Messungen mit dem jeweiligen Scanner – und MAXΔXYZ, d. h. der größte einzelne systematische Fehler in einer beliebigen Richtung, der bei den drei Wiederholungsmessungen für jeden einzelnen Scanner festgestellt wurde, sind wahrscheinlich die wichtigsten Parameter für die praktische Anwendung, da sie die maximale systematische Ungenauigkeit des Scanners angeben.