Il monitoraggio degli spostamenti e dei movimenti delle rocce nell'estrazione mineraria sotterranea è fondamentale per la sicurezza e l'efficienza operativa. I metodi tradizionali spesso non garantiscono una copertura completa né la precisione necessaria. Emesent introdotto una soluzione avanzata che utilizza sistemi SLAM LiDAR SLAM per migliorare il monitoraggio della convergenza nelle miniere sotterranee.
Emesent e direttore tecnico (CTO) Emesent , il dottor Farid Kendoul, illustra come il Emesent abbia applicato questa tecnologia per migliorare l'accuratezza dei dati e semplificare il processo di monitoraggio, offrendo un approccio più efficace all'identificazione e alla gestione di potenziali problemi.
A cura del dott. Farid Kendoul
UNA SOLUZIONE INNOVATIVA PER LE PROBLEMATICHE COMUNI DELLE RETI SOTTERRANEE
L'estrazione sotterranea pone sfide particolari, soprattutto per quanto riguarda il monitoraggio degli spostamenti e dei movimenti delle rocce, che possono comportare gravi conseguenze quali infortuni e costosi ritardi nella produzione, in particolare man mano che le miniere si spingono a profondità maggiori.
I metodi tradizionali, quali la mappatura dei danni, gli estensimetri e le stazioni totali, presentano indubbi vantaggi, ma spesso risultano carenti in termini di copertura, precisione e frequenza. La tecnologia3D LiDAR offre un'alternativa superiore per il monitoraggio della convergenza, garantendo una copertura estesa e fornendo informazioni dettagliate sui movimenti e sulle deformazioni della roccia nelle gallerie sotterranee. Tuttavia, per un monitoraggio efficace, le due scansioni (di riferimento e nuova) devono essere allineate con precisione per rilevare piccoli movimenti e variazioni (ad esempio, spostamenti o variazioni di 20 mm). Un disallineamento o errori di scansione possono portare a interpretazioni errate della deformazione o della convergenza.
Attualmente, per il monitoraggio della convergenza sotterranea vengono utilizzati due principali metodi LiDAR :
1. LiDAR terrestri (TLS)
I sistemi TLS forniscono 3D di elevata precisione. Se abbinati ai punti di controllo a terra, consentono di realizzare un 3D accurato di aree estese. Tuttavia, il processo di raccolta manuale dei dati richiede molto tempo: spesso occorrono giorni per coprire chilometri di gallerie e preparare i dati, il che ne limita l'uso a piccole aree critiche.
2. Scanner mobili SLAM
Questi scanner acquisiscono in modo efficiente vaste aree sotterranee nel giro di poche ore. Tuttavia, SLAM possono causare imprecisioni (deriva) nella 3D . Alcune miniere risolvono questo problema effettuando scansioni di piccole aree o suddividendo le scansioni di grandi dimensioni in sezioni più piccole, ricorrendo a software di terze parti e a procedure manuali per l'allineamento rigido, un processo che richiede molto tempo e ne limita la diffusione su larga scala.

Entrambi i metodi si basano sulla “trasformazione rigida” per allineare la scansione di riferimento e quella nuova. Questo processo comporta lo spostamento e la rotazione della nuova scansione per adattarla a quella di riferimento utilizzando metodi come l’ICP (Iterative Closest Point). Nell'allineamento rigido, sia la scansione di riferimento che quella nuova rimangono invariate, con la sola regolazione della loro posizione e orientamento (trasformazione). Sebbene questo approccio funzioni bene in condizioni ideali in cui le scansioni sono altamente accurate e le uniche differenze sono i cambiamenti ambientali, non è adatto ad ambienti su larga scala come tunnel lunghi chilometri. In tali casi, le imprecisioni intrinseche e le potenziali derive nelle scansioni portano a disallineamenti, con conseguenti errori nel rilevamento delle deformazioni reali e nella convergenza.
Emesent ha raccolto la sfida di sviluppare un nuovo sistema di monitoraggio della convergenza che unisca i vantaggi dei sistemiSLAM LiDAR SLAM senza i limiti menzionati in precedenza. Il loro approccio innovativo sfrutta LiDAR SLAM una scansione efficiente di aree estese, potenziata da algoritmi innovativi che consentono di allineare automaticamente scansioni di ampia portata e fornire risultati precisi.
Il cuore del sistema di monitoraggio della convergenza Emesentè costituito SLAM sua avanzata SLAM , che consente l'allineamento non rigido (elastico o flessibile) di scansioni di grandi dimensioni che potrebbero presentare derive, mantenendo al contempo la precisione locale per il monitoraggio della convergenza e il rilevamento dei cambiamenti.
UN APPROCCIO PIÙ EFFICACE AL MONITORAGGIO DELLA CONVERGENZA
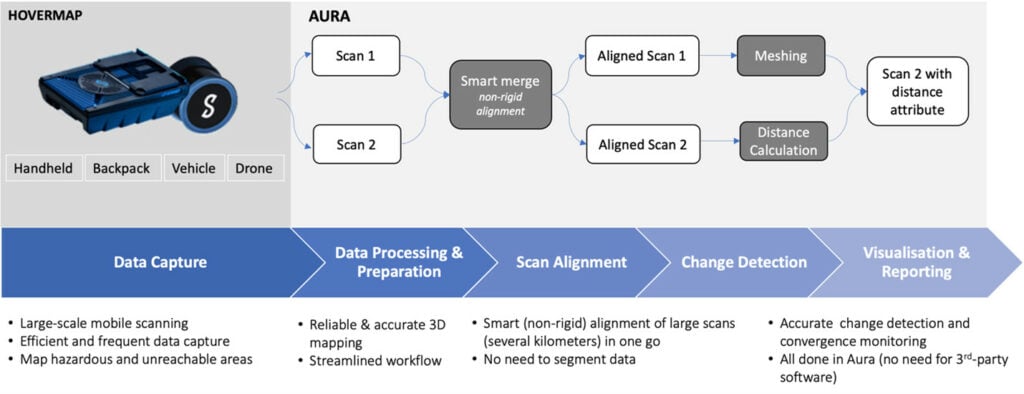
La soluzione Emesentper il rilevamento delle variazioni e il monitoraggio della convergenza combina SLAM mobile ad acquisizione rapida con un flusso di lavoro di elaborazione più veloce, semplice e ripetibile. Ciò consente agli operatori del settore minerario di eseguire scansioni degli scavi su un’area più ampia con maggiore regolarità e di monitorare le variazioni utilizzando dati accurati e quantitativi.
La soluzione combina due Emesent principali Emesent :
1. Uncarico utile Hovermapinstallato su un veicolo, uno zaino, un drone o un dispositivo portatile per eseguire la scansione di quasi tutte le aree sotterranee in modo efficiente o addirittura autonomo.
2.Il software desktop Auraper l'elaborazione dei dati grezzi, l'allineamento intelligente delle scansioni, il confronto tra le scansioni e il calcolo delle variazioni, la visualizzazione dei risultati e molte altre operazioni utili. La maggior parte di questi flussi di lavoro è automatizzata e richiede un intervento minimo da parte dell'utente.
FORNIRE INFORMAZIONI UTILI GRAZIE ALL'INNOVAZIONE
Il sistema di monitoraggio della convergenza Emesentrappresenta una svolta nel monitoraggio geotecnico, sfruttando le funzionalità avanzate della SLAM Wildcat SLAM per un allineamento intelligente e non rigido (elastico e flessibile) delle scansioni. In questo approccio innovativo, la prima scansione viene utilizzata come riferimento e rimane invariata, mentre la seconda scansione subisce modifiche elastiche per allinearsi localmente con la scansione di riferimento attraverso una trasformazione non rigida. Questo processo si basa sull'identificazione e la corrispondenza precise delle 3D in entrambe le scansioni, tenendo conto in modo efficace di scostamenti ed errori. Tale allineamento locale è essenziale per rilevare con precisione i cambiamenti e monitorare la convergenza in aree estese e gallerie acquisite in modo efficiente da un sistema SLAM mobile.
Questo metodo consente l'allineamento preciso di scansioni di grandi dimensioni, come ad esempio chilometri di gallerie sotterranee, garantendo un elevato livello di precisione ed eliminando al contempo la necessità del laborioso processo di segmentazione dei dati solitamente impiegato per correggere la deriva di scansione. Di conseguenza, permette di rilevare deformazioni e variazioni minime, a partire da 5 mm in aree specifiche e fino a 15 mm in tipici ambienti sotterranei.
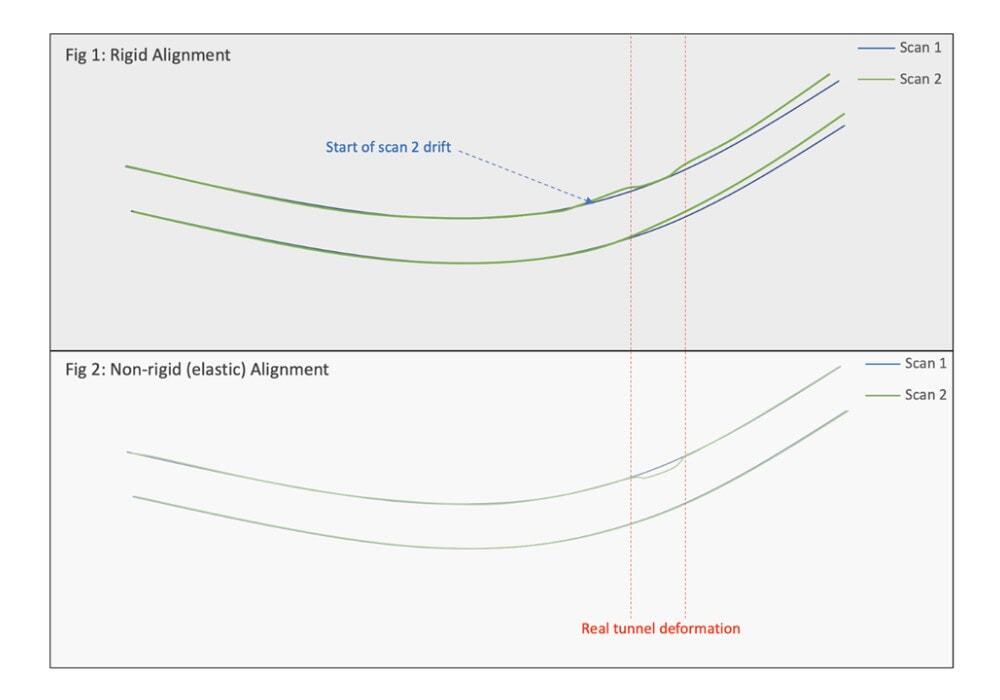
Per illustrare i vantaggi di questo allineamento tramite scansione intelligente, si consideri l'esempio riportato nelle figure 1 e 2.
La scansione 1, indicata in blu, è la scansione di riferimento. Prima di eseguire la scansione 2, indicata in verde, il tunnel ha subito una lieve deformazione evidenziata in rosso. Durante l'acquisizione della scansione 2, si è verificato uno scostamento verso la fine della scansione a causa degli errori accumulati dal SLAM o di errori nella combinazione e nella georeferenziazione delle scansioni statiche.
Nella Fig. 1, un allineamento rigido tra la scansione 1 e la scansione 2 nasconde la vera deformazione del tunnel e stima invece una variazione apparente dovuta alla deriva di scansione.
Al contrario, la figura 2 dimostra che una trasformazione intelligente non rigida tiene conto della deriva ed evidenzia chiaramente la vera deformazione della galleria come differenza tra la scansione 1 e la scansione 2.
Sebbene l'algoritmo gestisca in modo intelligente le deformazioni locali, è importante notare che, qualora l'intero tunnel subisse uno spostamento globale nella seconda scansione – un evento piuttosto raro –, l'allineamento intelligente interpreterebbe tale fenomeno come una deriva nei dati SLAM e lo deformerebbe per allinearlo alla scansione di riferimento, non rilevando così lo spostamento globale.
Grazie alla combinazione di questo algoritmo all’avanguardia con i flussi di lavoro automatizzati di Aura, la soluzione Emesentoffre un flusso di lavoro semplificato e intuitivo che elimina la necessità di segmentare i dati o di effettuare allineamenti manuali. Ciò la rende ideale per scansioni di lunga durata di gallerie, tunnel e altre vaste aree sotterranee. Eliminando la dipendenza da software di terze parti e riducendo al minimo l'intervento dell'utente, il sistema Emesentoffre un flusso di lavoro più veloce ed efficiente con risultati ripetibili e quantificabili sui punti in cui si verificano cambiamenti o dilatazioni, nonché sulla velocità di tali cambiamenti su aree estese.
PROMUOVERE LE MIGLIORI PRATICHE DEL SETTORE
L'innovativo sistema di monitoraggio della convergenza Emesentnon solo migliora la sicurezza e la produttività delle operazioni minerarie sotterranee, ma sottolinea anche la leadership dell'azienda nel settore delle tecnologie minerarie. La combinazione della SLAM Wildcat SLAM e Aura rappresenta un approccio rivoluzionario al monitoraggio geotecnico, offrendo precisione ed efficienza senza pari.
Mentre il settore minerario continua a evolversi rapidamente, l'impegno costante Emesentnei confronti dell'innovazione contribuirà a migliorare la sicurezza operativa e la produttività.