


完全自治
GPSの有無にかかわらず、追加インフラ不要で、通信範囲外やBVLOSでの展開を可能にする高度なナビゲーションを提供します。

世界をリードするSLAM
他のSLAM システムが故障するような厳しい環境でも実証された信頼性

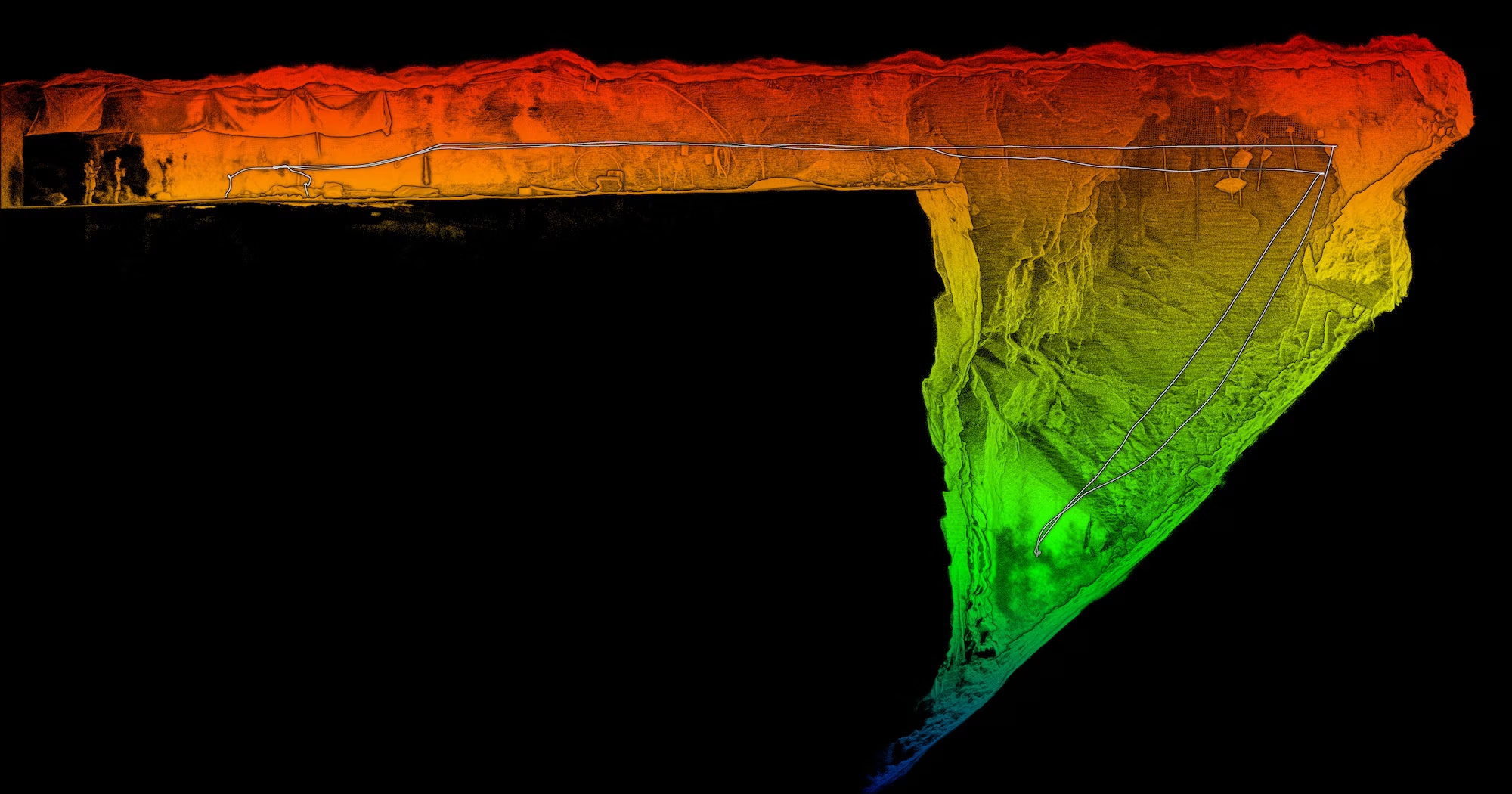
リアルタイムの可視化
スキャンしながら点群をプレビューし、完全なデータキャプチャを実現
自動ジオリファレンス
精度を向上させ、労働集約的で時間のかかるプロセスを排除します。

高度な衝突回避性能
バーチャルセーフティバブルを提供し、GPSが届かない複雑な環境でもドローンを安全に飛行させることができる。
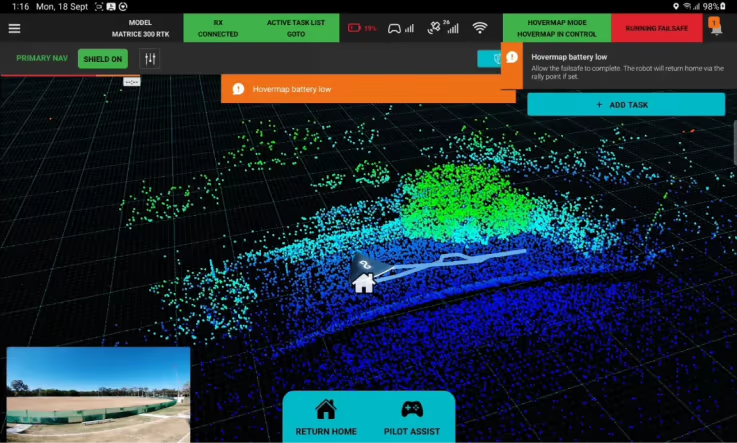
内蔵フェイルセーフ
段階的な警告・通知システムにより、スキャン中に必要なアクションを通知し、ミッションを軌道に乗せる。

ホームへ戻る
通信が途絶えた場合、ドローンは帰還します。

ダストフィルター
粉塵の多い環境でも、より安全で確実なフライトを実現

多彩な展開
単一のデバイスを複数の展開プラットフォーム間で簡単に切り替え可能


