


RTK対応
高速、高精度、再現性のある結果で、広いエリアや長い直線的な資産を確実にスキャンし、GCPの必要性を低減または排除します。

自動ジオリファレンスとドリフト補正
労働集約的で時間のかかるプロセスを排除

多彩な展開
プラグアンドプレイ設計により、ハンドヘルド、ドローン、車両、ポールへの取り付け、ケージへの収納、バックパックへの取り付けなど、プラットフォームの切り替えが容易。

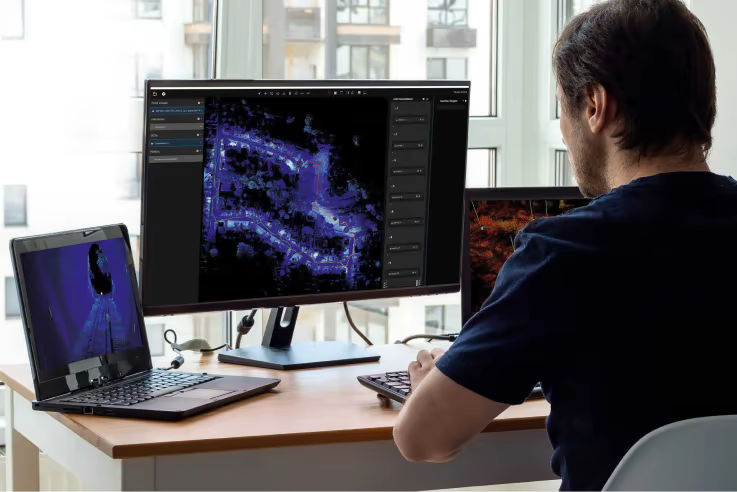
スキャンしながらストリーム
Commander によるスキャン環境のリアルタイム高密度可視化

360°カラー化&画像キャプチャ
点群にコンテキストを追加し、関心のある領域を強調表示します。

アンケートの採点結果
最高SLAM自動地理参照を組み合わせ、RTKが利用できない環境でも結果をさらに向上させます
ソフトウェアの統合
Autodesk Recap/RevitやBentley Point Toolsを含む標準的なCADパッケージへのインポート

セット・アンド・ゲット・プロセッシング
環境から動くものを取り除くことを含む自動クリーニングツールで