








1.ターゲットを置く
No more fading painted crosses or easily damaged foam spheres!Emesent’s ground control targets are durable and easily placed and left in place for repeated scanning.Emesent'sのスピゴットマウントディスクが利用可能で、反射ディスクターゲットは簡単に調達または作ることができます。
2.ターゲットを調査する
トータルステーションまたはGPSローバーを使用して、新しいターゲット位置で測量します。Emesentのスピゴットマウントターゲットを既存の測量カラーに設置することで、ターゲットの中心が既存の測量プリズムの位置と一致するため、再測量の必要がなくなります。
.avif)
3.ノンストップ・スキャンの実施
機械学習は、処理中のスキャンで自動的にターゲットを検出するために使用されるため、停止したり、ターゲットにHovermap 、スキャン時間を最小限に抑える必要がない。

4.データを処理する
生スキャンデータと測量座標をEmesentのAura ソフトウェアに入力します。Ground Controlは自動的に測量ターゲットを検出し、点群の非剛体変換を適用するため、最も正確な結果が得られます。
.avif)
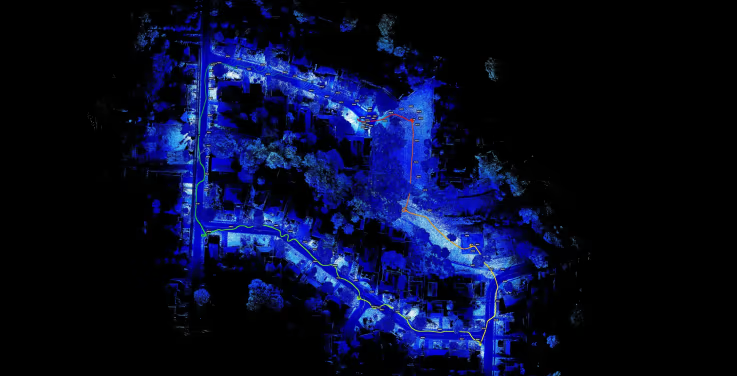
5.結果を確認する
また、ターゲット検出とコンステレーションマッチングの結果は、Emesentの点群ビューア(Aura )で視覚化し、確認や調整を行うこともできる。
.avif)
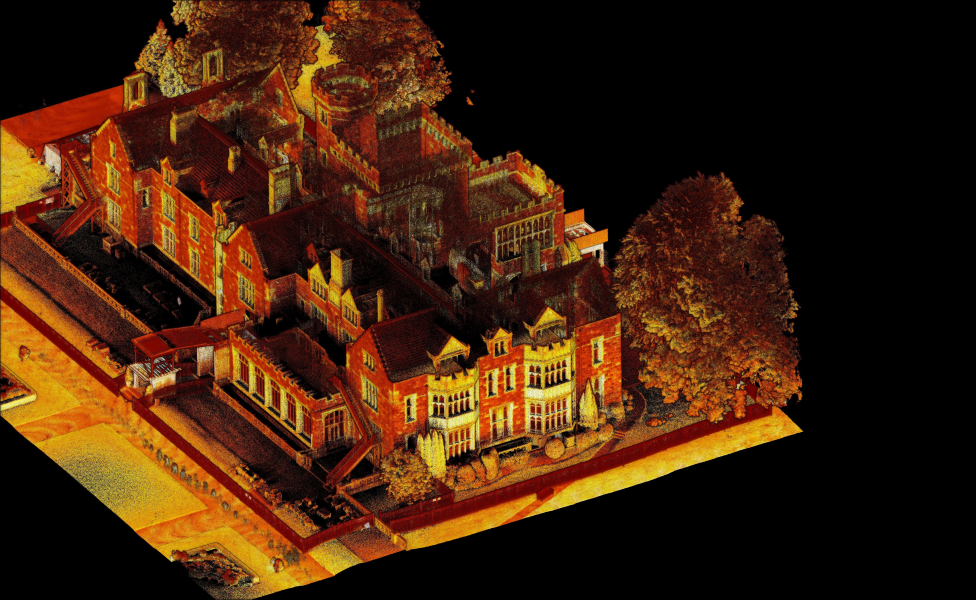
6.出力調査グレード結果
正確で地理参照されたHovermap 点群は、使用する準備ができています。


