








Building Better Point Cloud Visualization Software for More Intelligent Insights
The drawback to this technique is that we are only exploring the data that the algorithm is deciding is relevant or important. The lower the Point Budget, the more these algorithmic decisions affect the final output. There are ways around this, for example, by using a larger point size to blend points into surfaces. However that is essentially synthetic and not “real” data.
This isn’t necessary for Hovermap data, as it produces very dense point clouds, and the detail is there without needing to be synthesized. So, since starting the project, we have been extending the plugin to cater for our dense data.
One of our early extensions was to add support for the point attributes that are produced by our SLAM processing software. We included support for displaying intensity, time, ring number, range, and true color attributes.
Another was to maximize our single frame render budget to 100 million points – well beyond what came out of the box from Unreal.

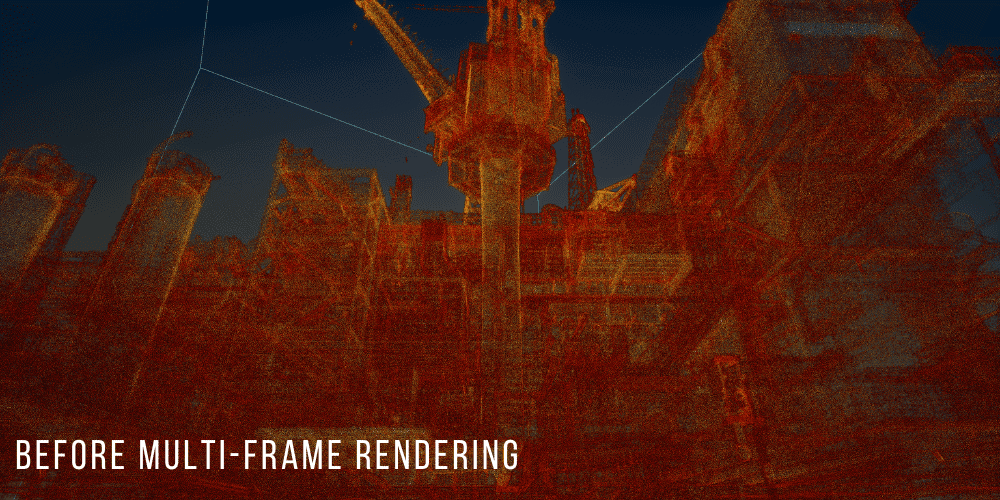
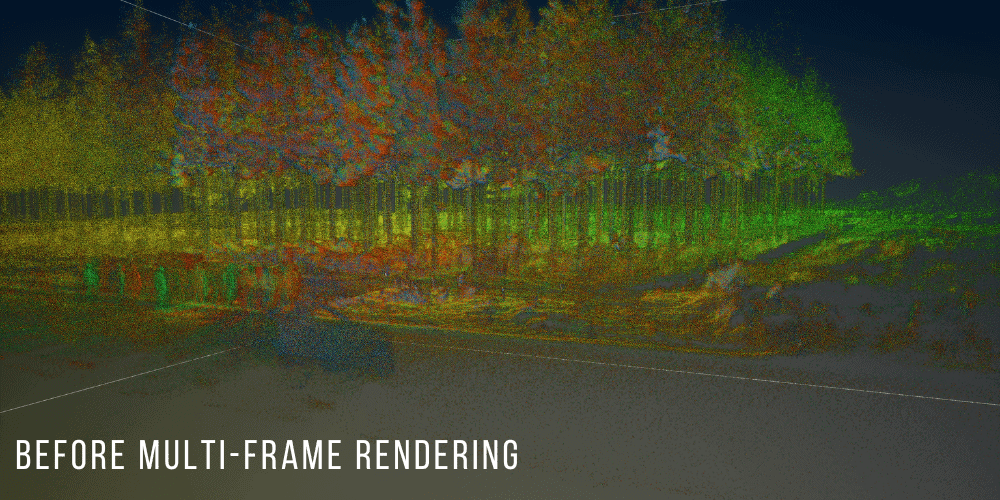
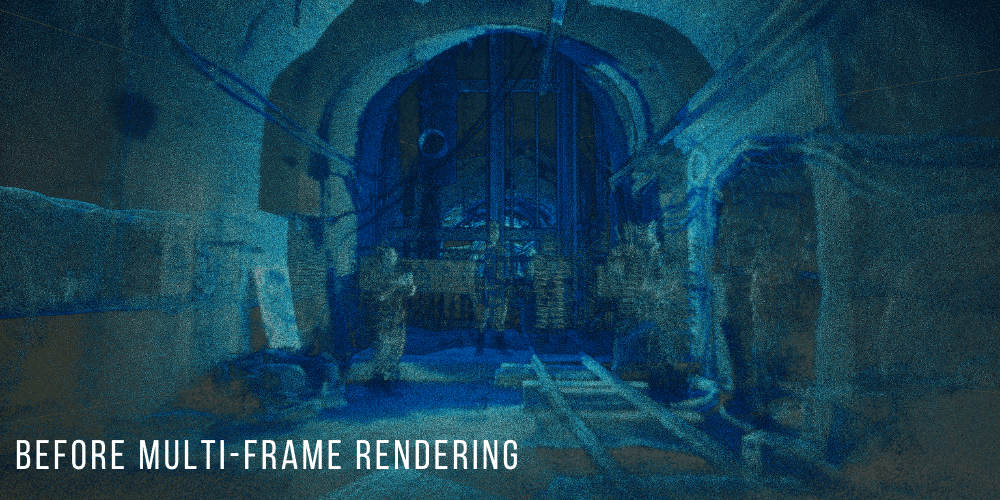
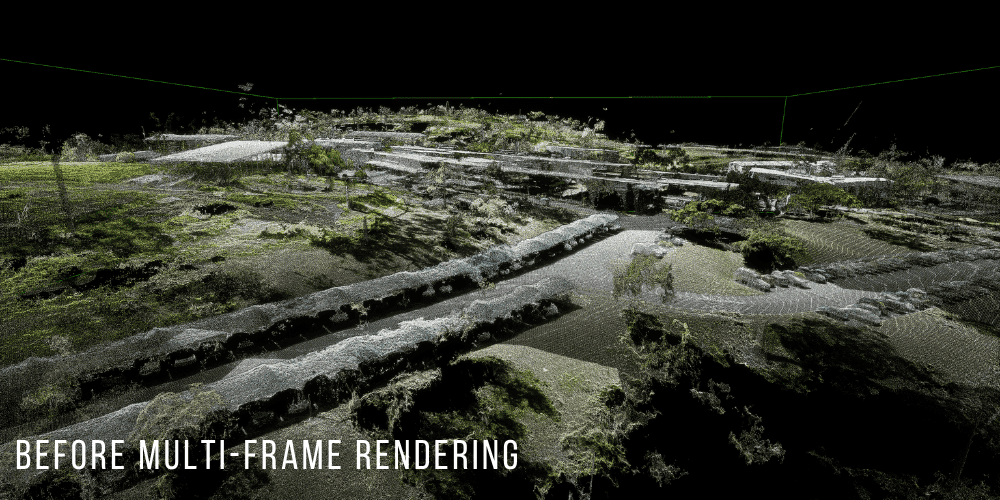
Hovermap scan before Emesent’s Multi-Frame Rendering.

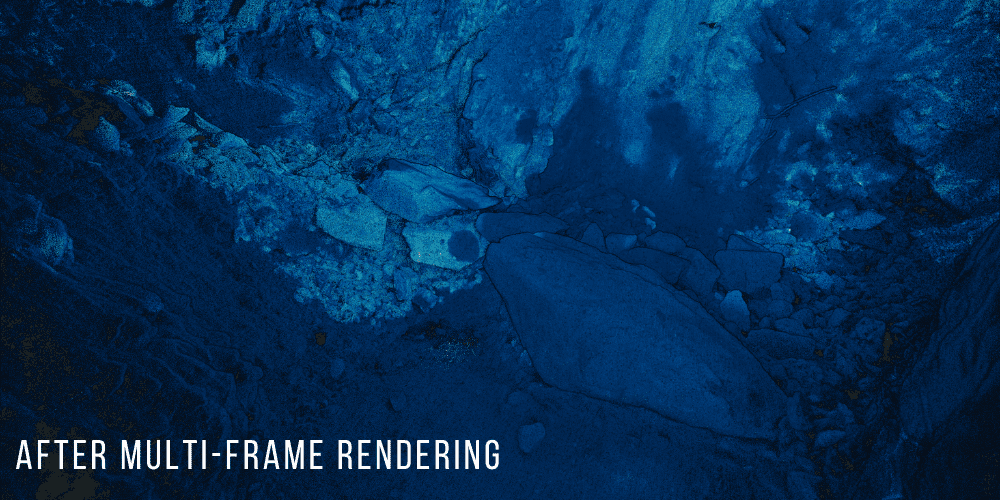
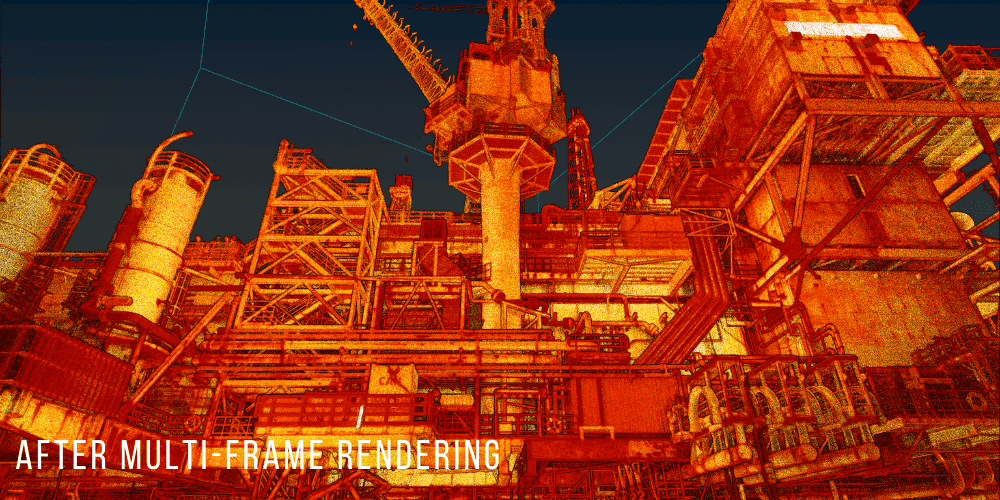
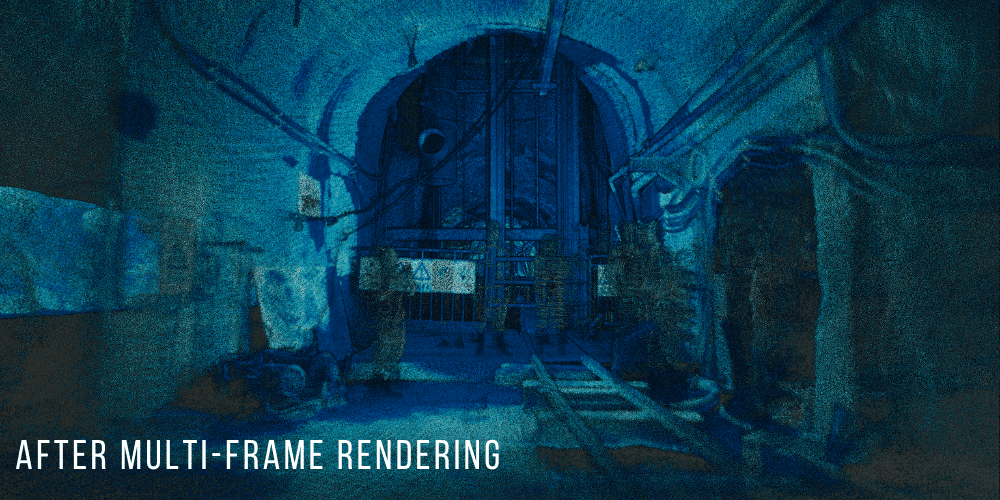
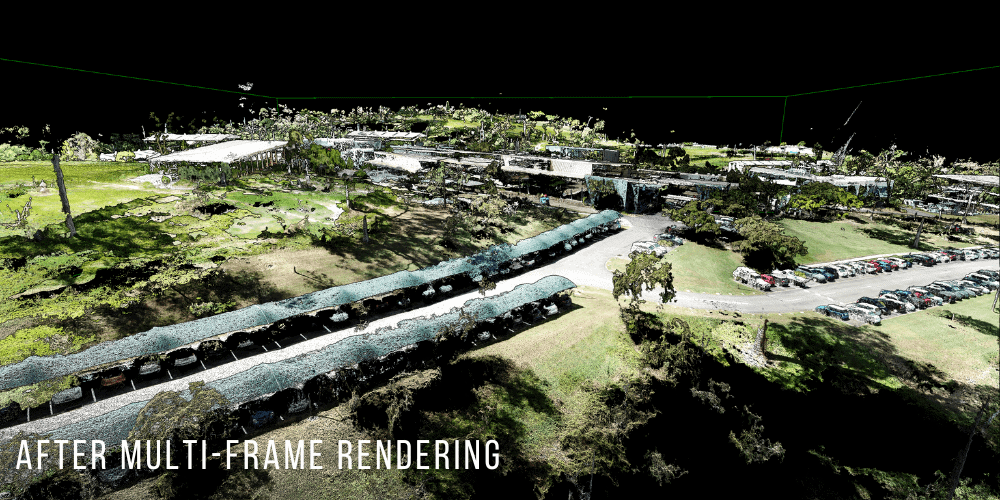
The Multi-Frame Rendering within Emesent’s visualization application will allow users to explore Hovermap datasets with billions of points quickly.
But this didn’t meet requirements. Hovermap captures datasets with billions upon billions of points, so we needed a different approach to our final output.
To enable a full frame render of all points, we developed a system we call Multi-Frame Rendering. With this concept, we have modified the renderer to build up the image over multiple GPU frames. To apply it the algorithm begins by traversing the octree looking for the most visually relevant nodes (collections of points), they are tagged and then rendered. The algorithm then traverses the octree again and looks for next most visually relevant nodes that have not already been rendered. This is repeated until there are no more points remaining.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}